Сборка «робота - дезинфектора» для обработки рук
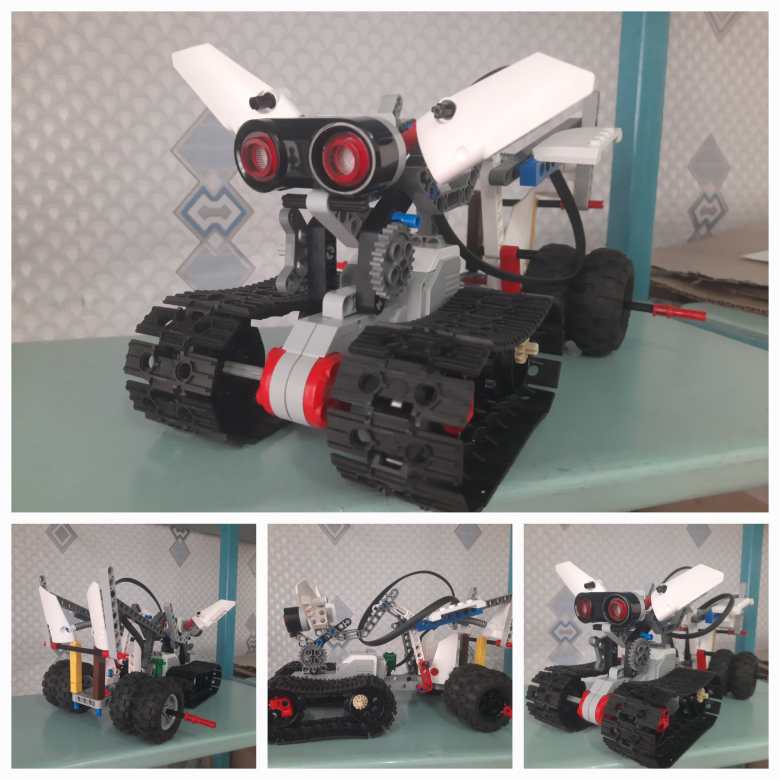
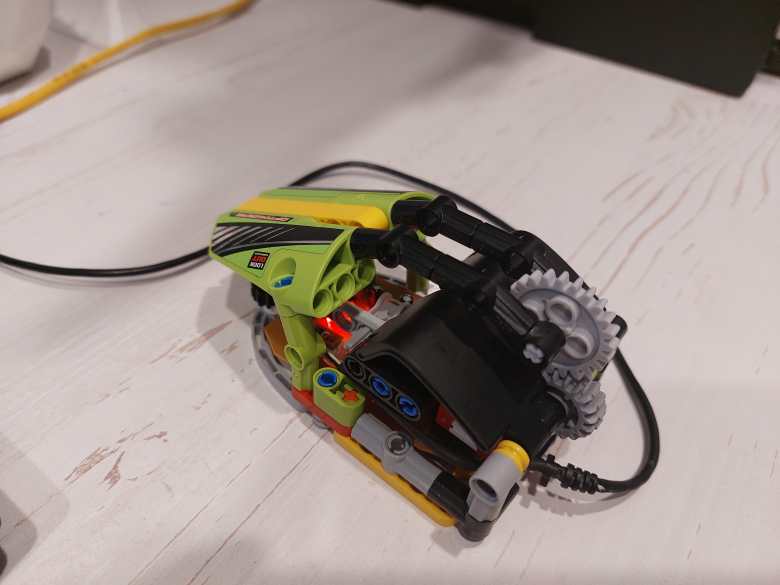
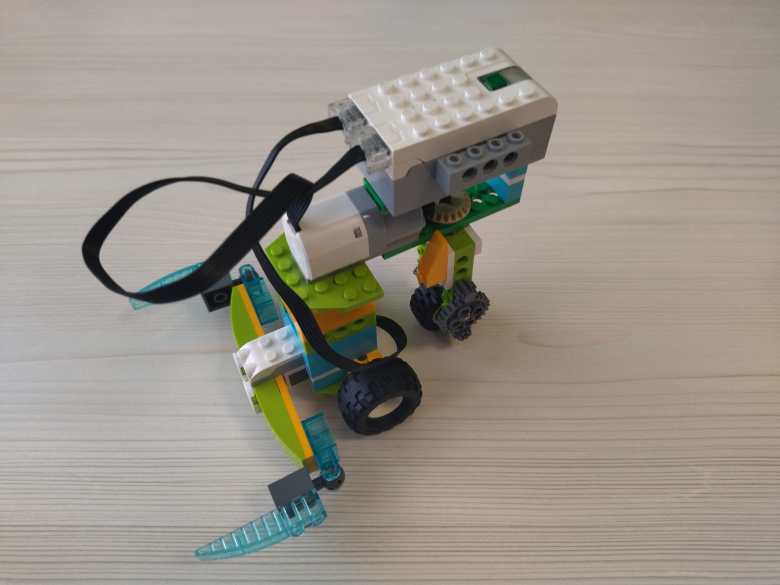
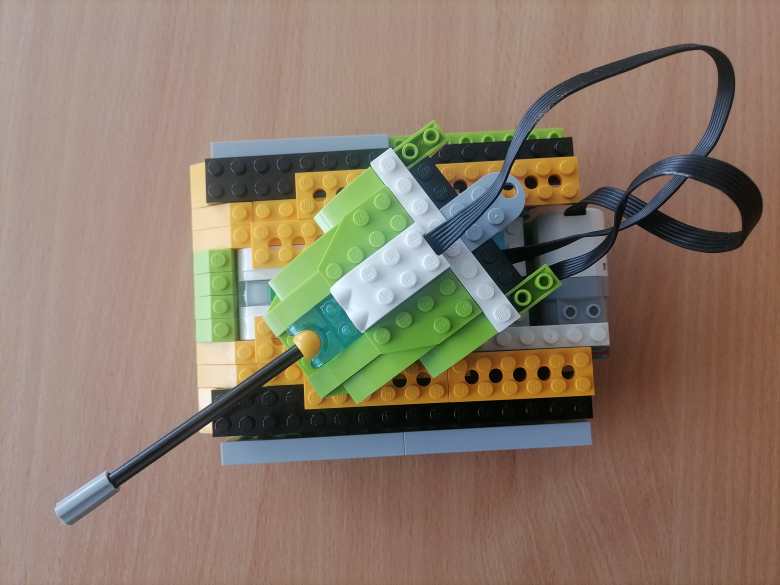
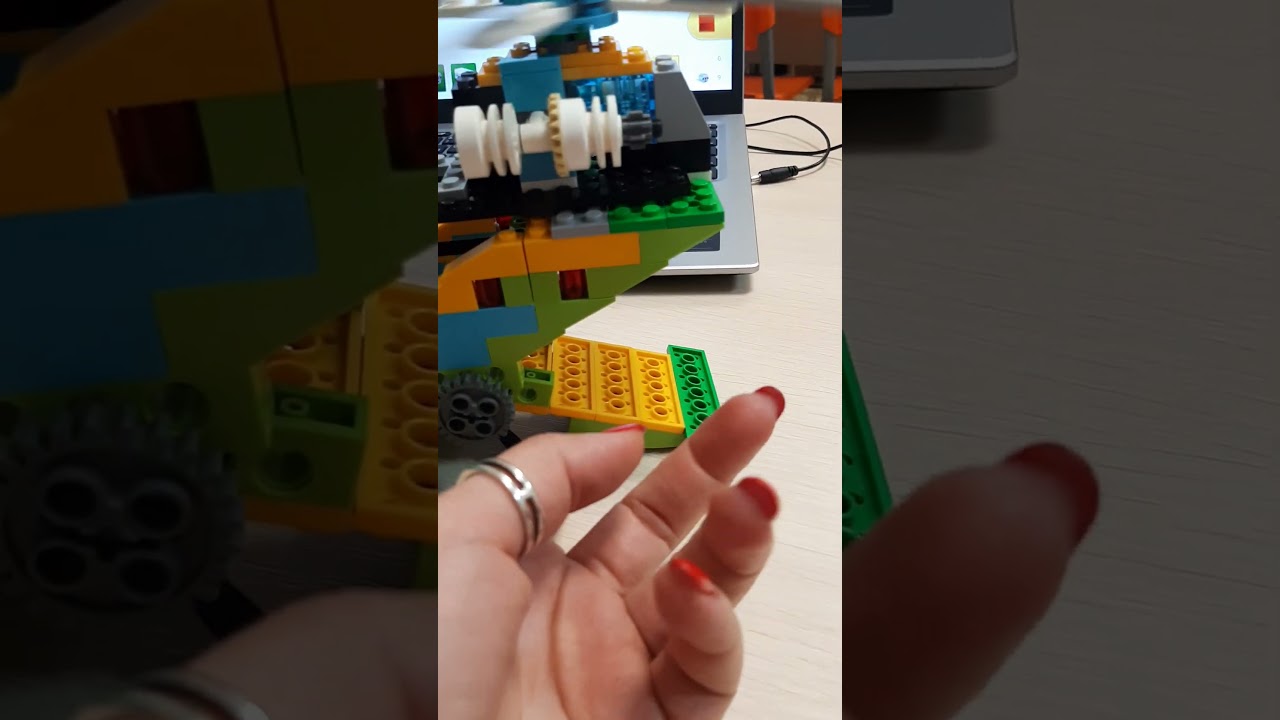
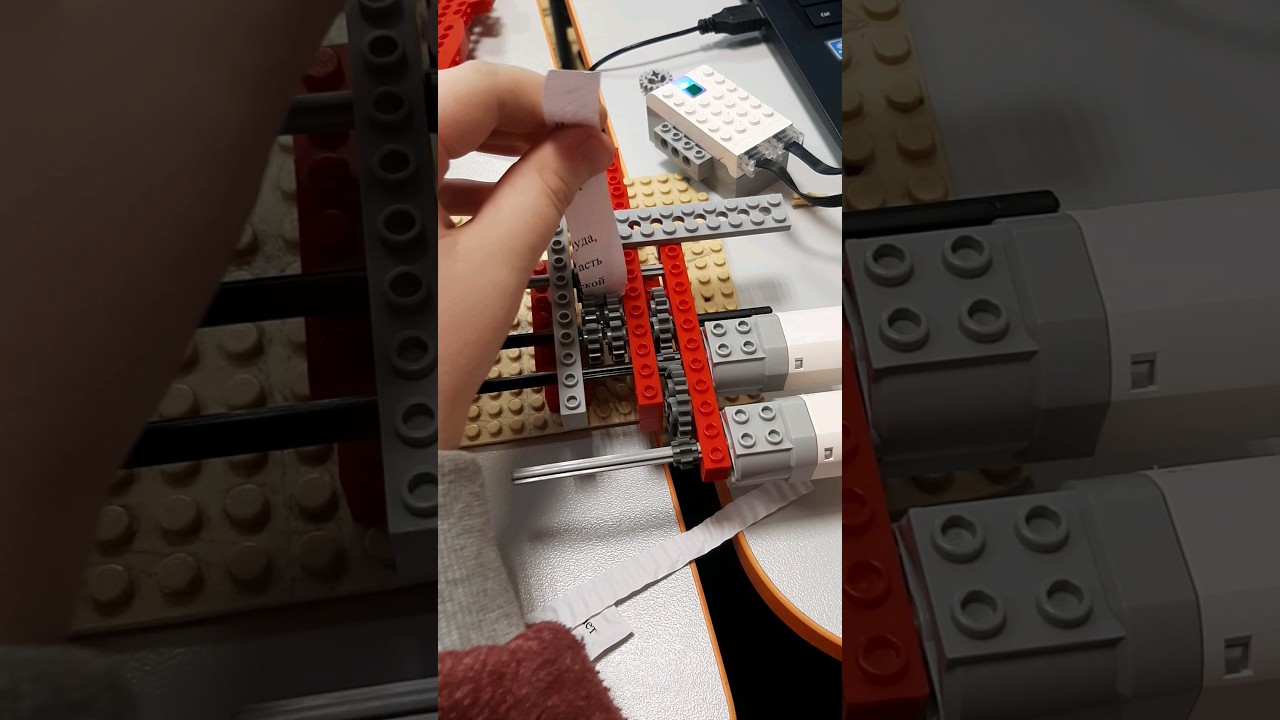
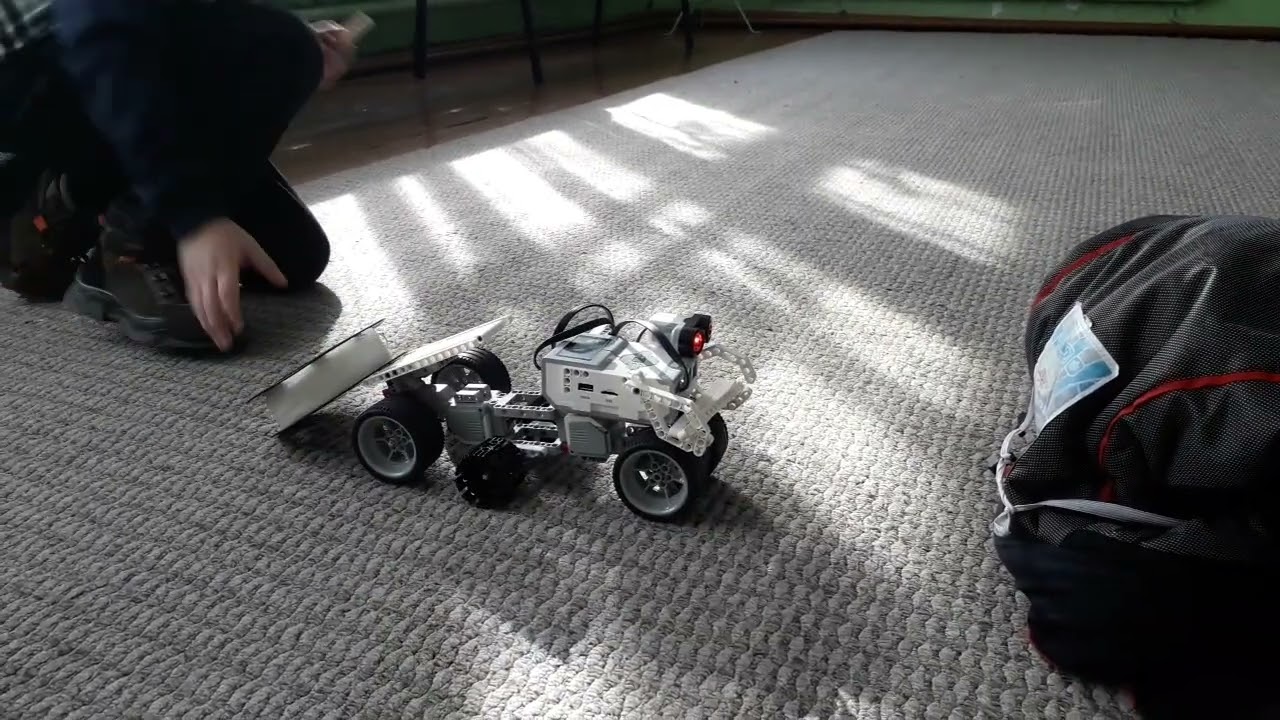
Выполняя практическую часть, я использовал базовые приёмы робототехники. Для сборки робота дезинфектора мне понадобились: управляющий программируемый блок,2 DS -мотора, ультразвуковой датчик расстояния, соединительные детали конструктора «КЛИК». Приложение 3
Для программирования бесконтактного робота – дезинфектора я использовал среду mblok5. Приложение 4
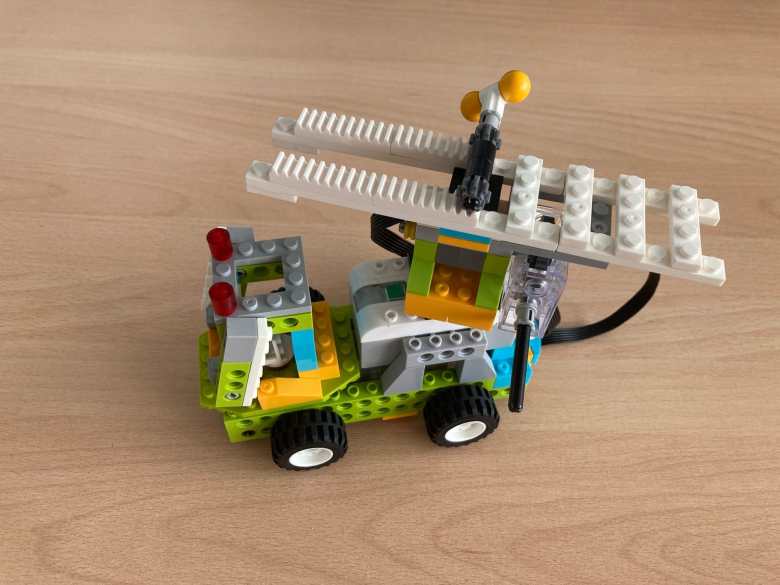
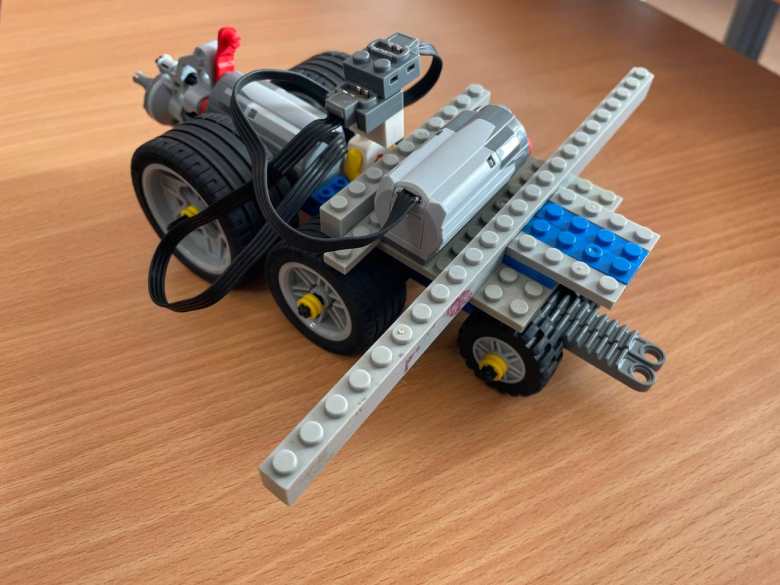
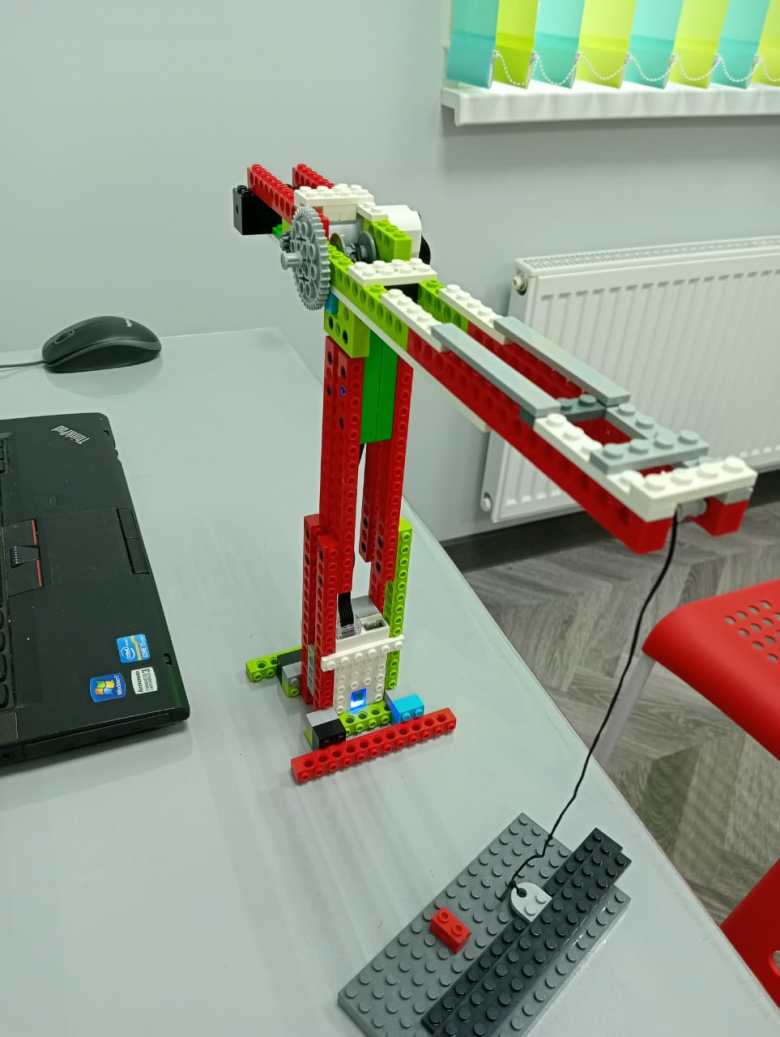
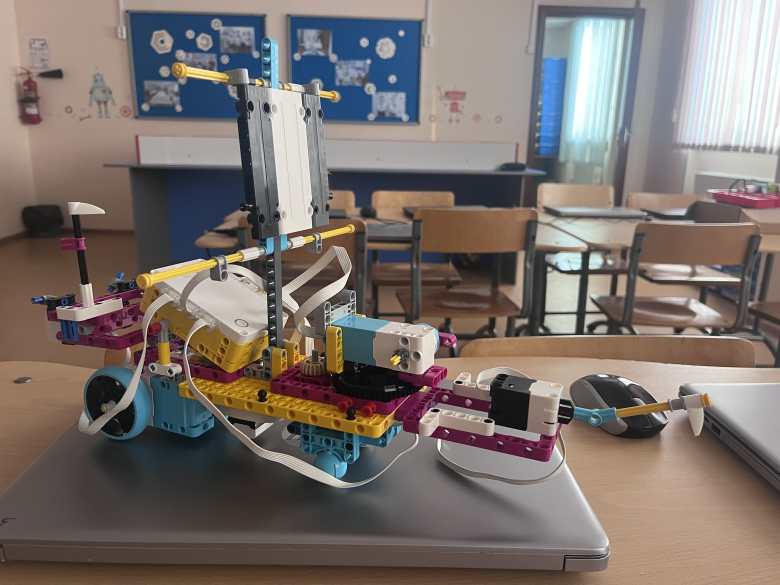
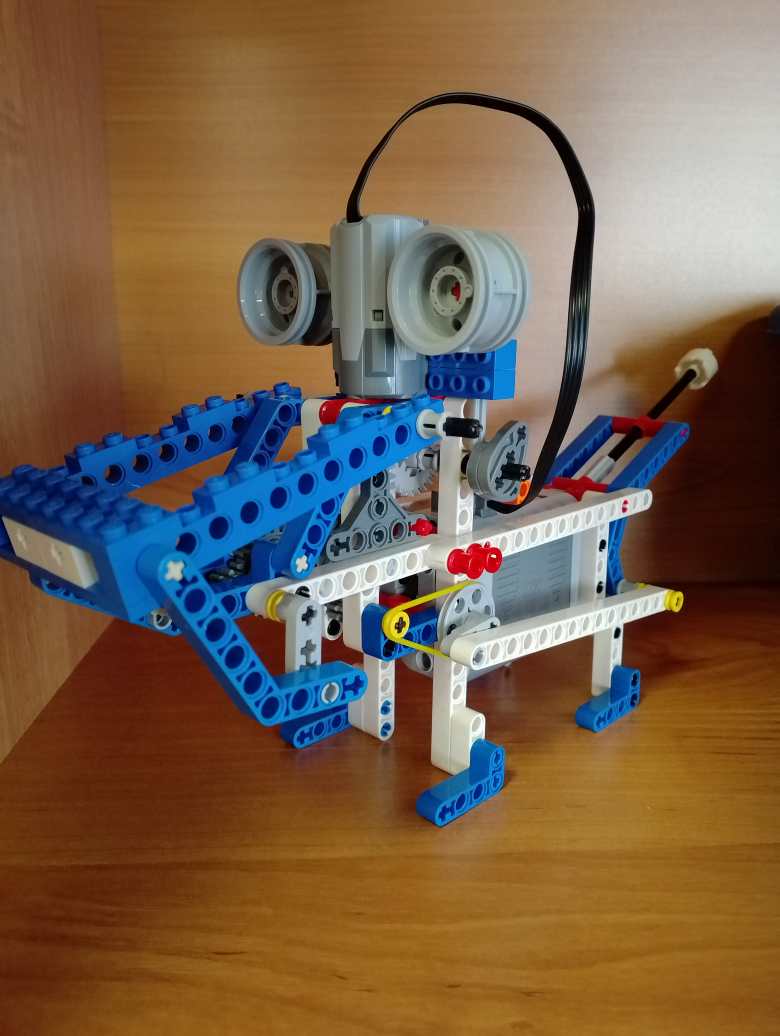
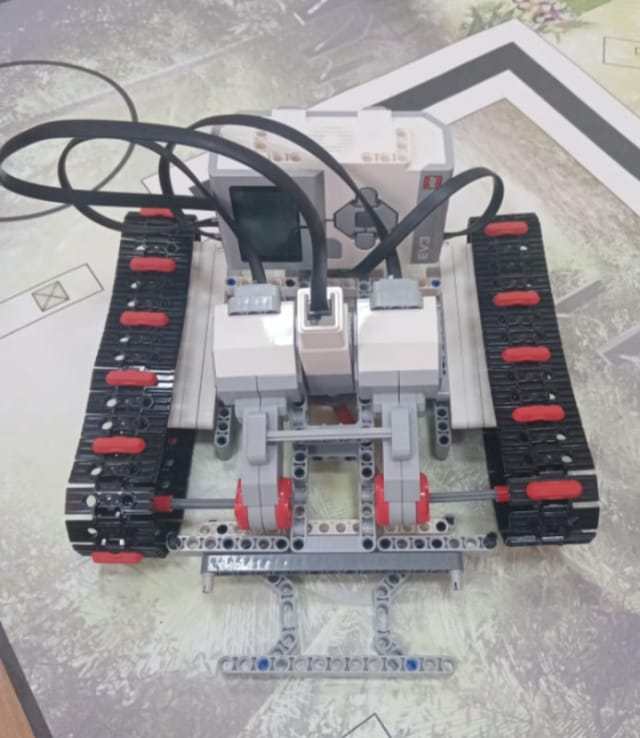
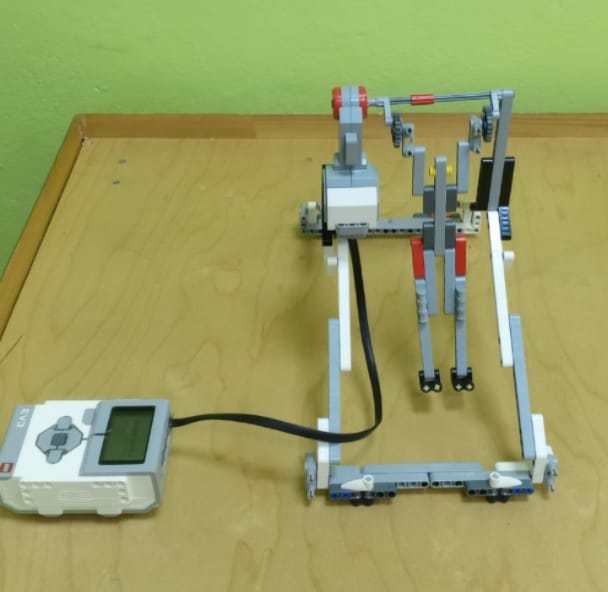
Управляющий блок я расположил сбоку, с целью предотвращения попадания на него моющего средства. Моторы присоединил по бокам, соединил их с помощью балки присоединенной к зубчатым колесам.
Моторы приводят в движения балки, балки приводят в движения конструкцию для нажима на дозатор. За движение и остановку моторов отвечает ультразвуковой датчик расстояния. При поднесении руки датчик считывает информацию, управляющий блок заставляет моторы двигаться, балка давит на дозатор и поступает моющее средство. Когда руку убираем, моторы останавливаются.
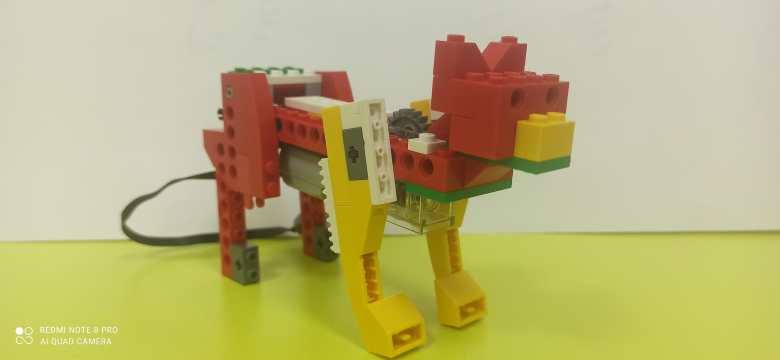
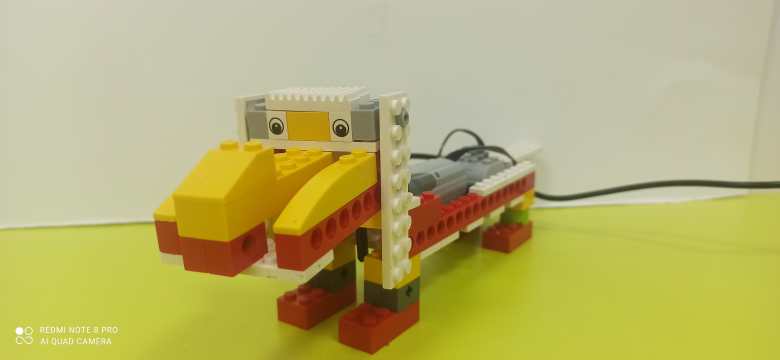
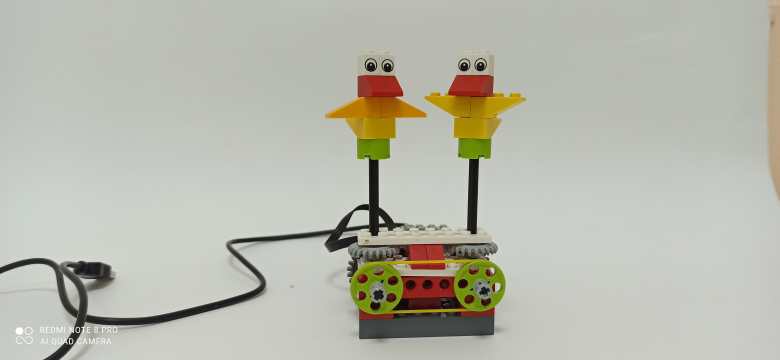
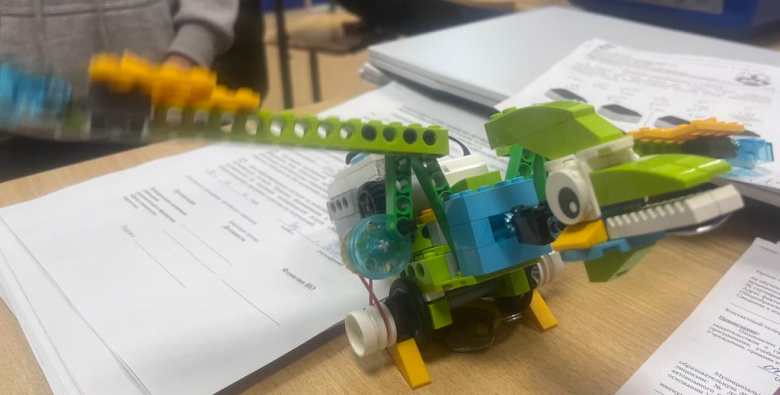
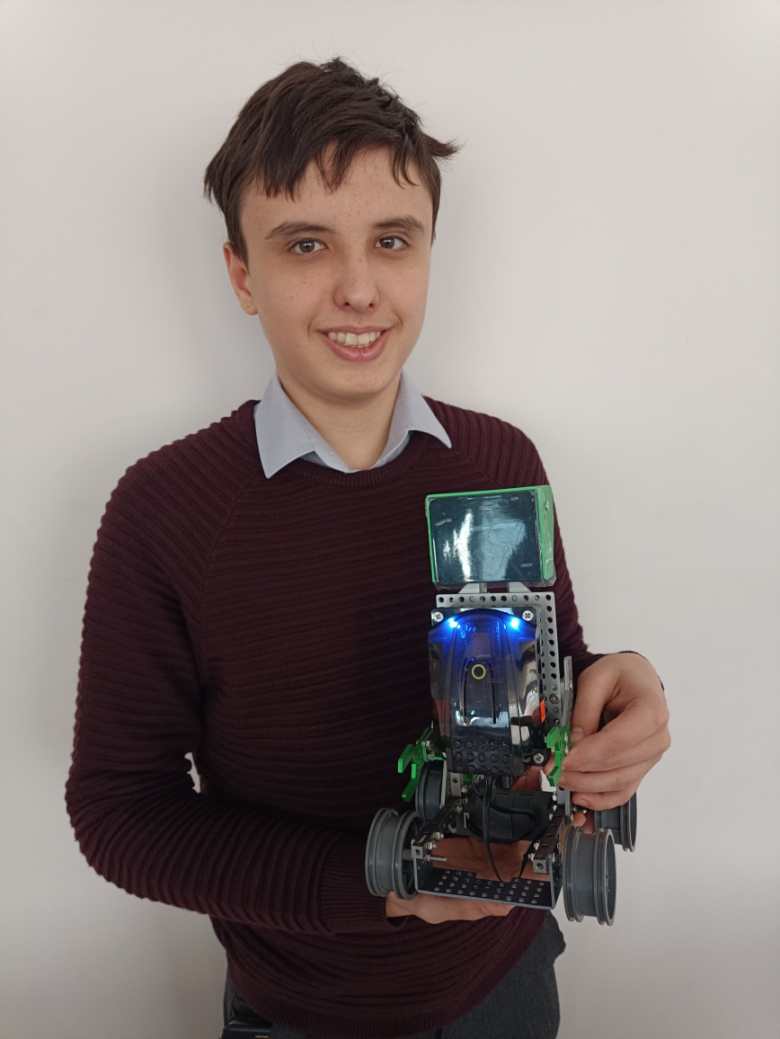
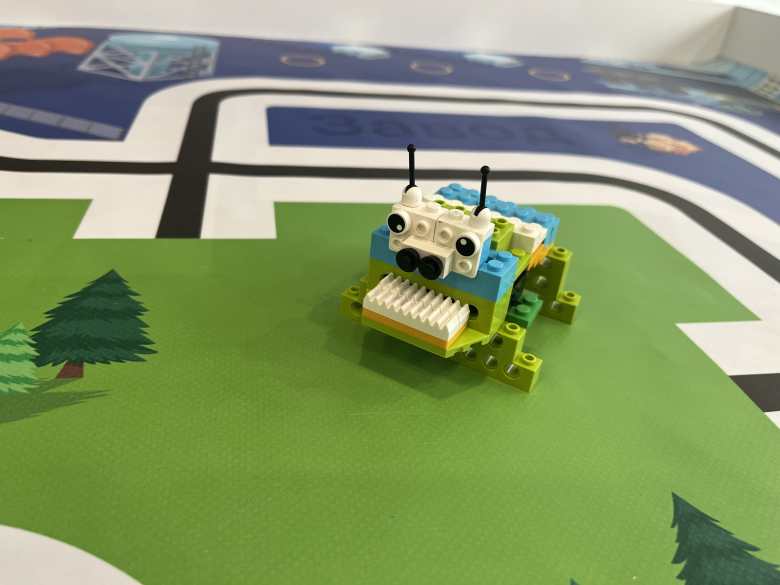
Работа «Робот – дезинфектор»

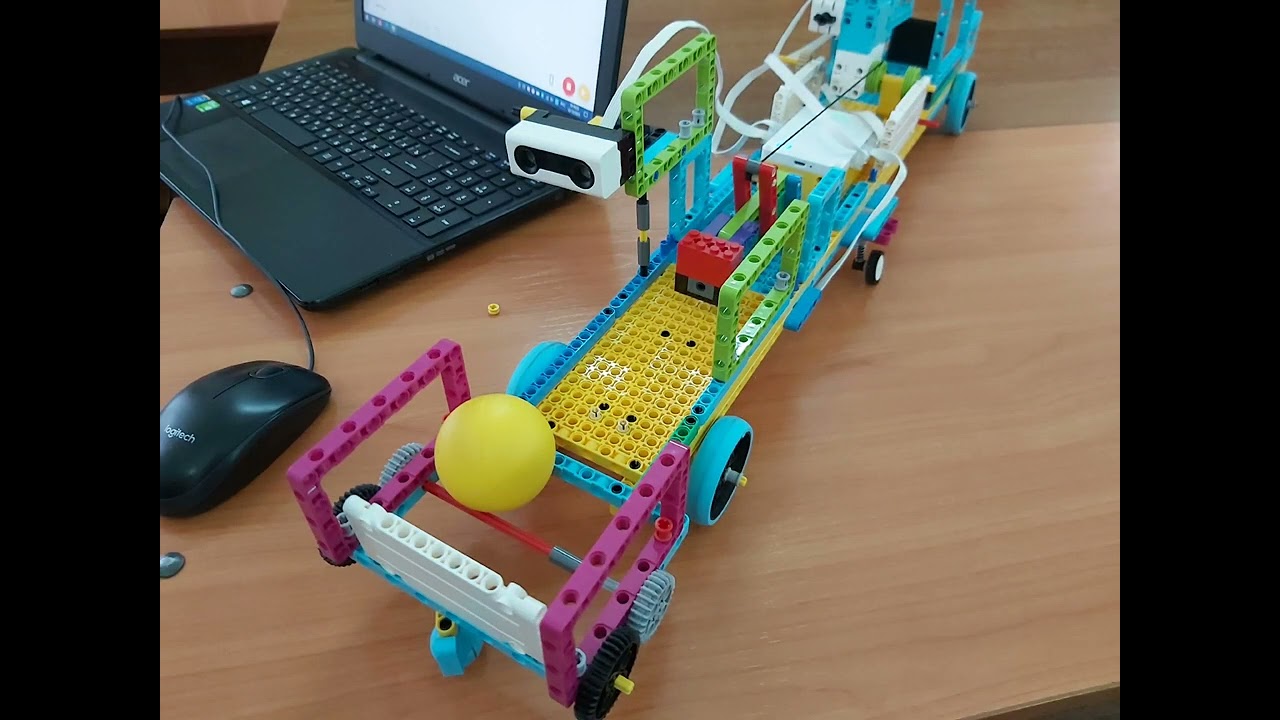
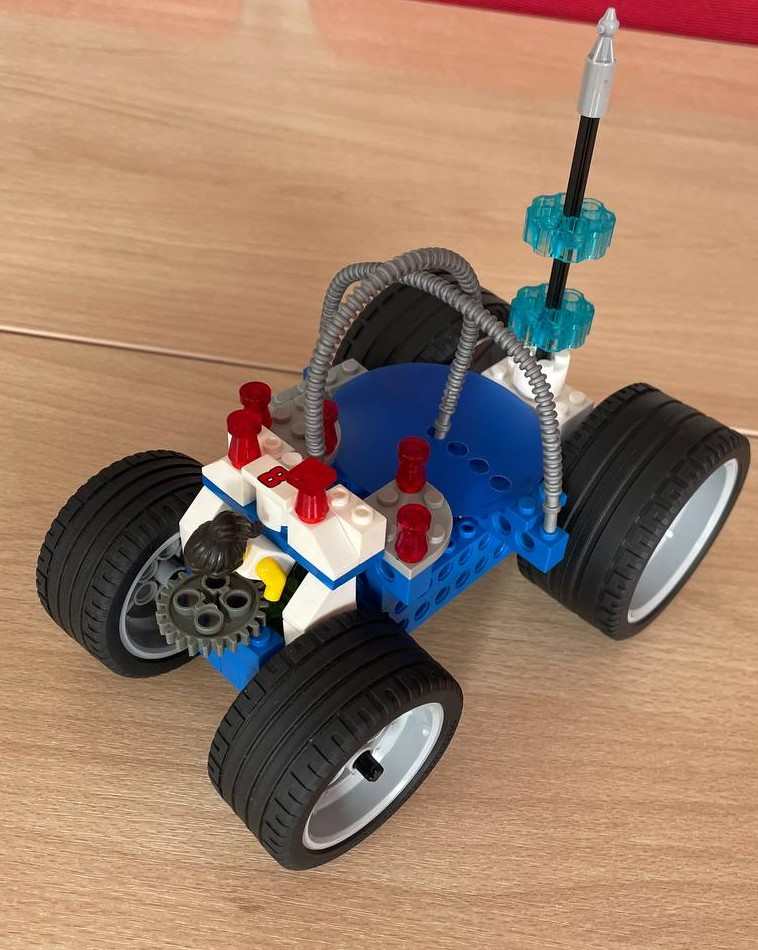
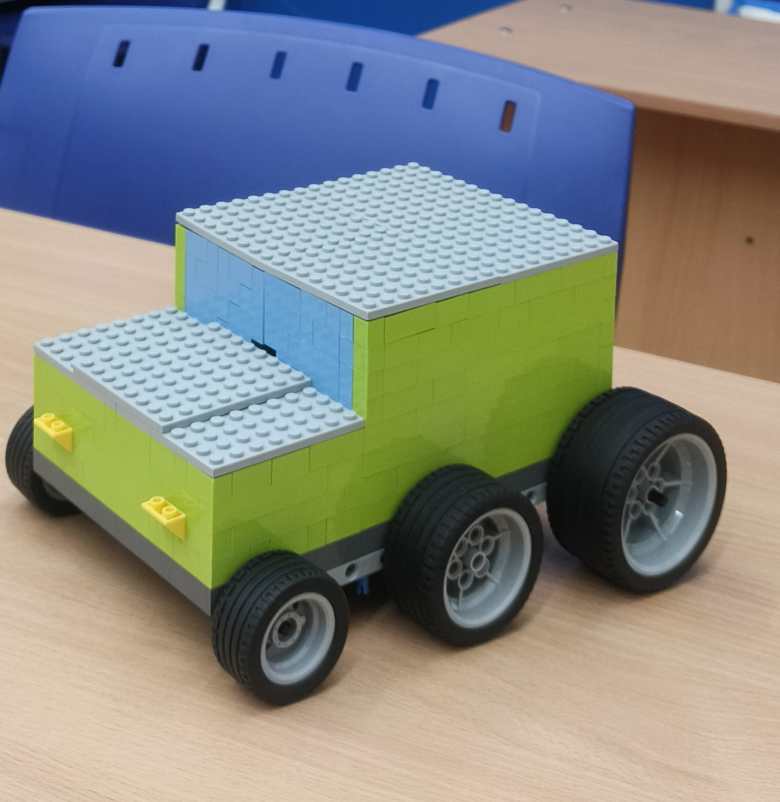
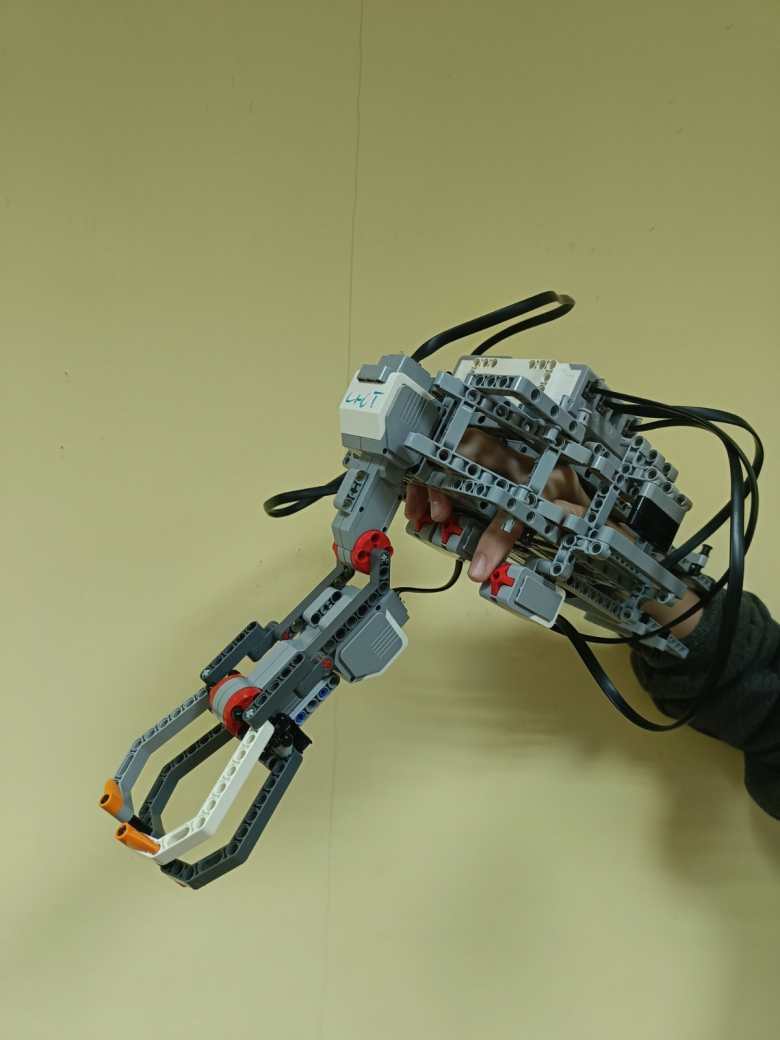
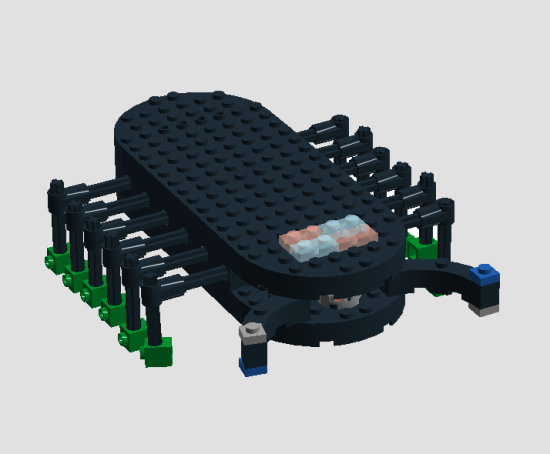
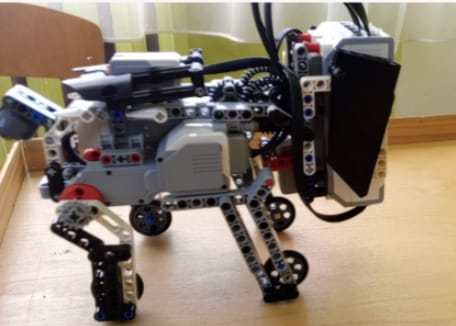
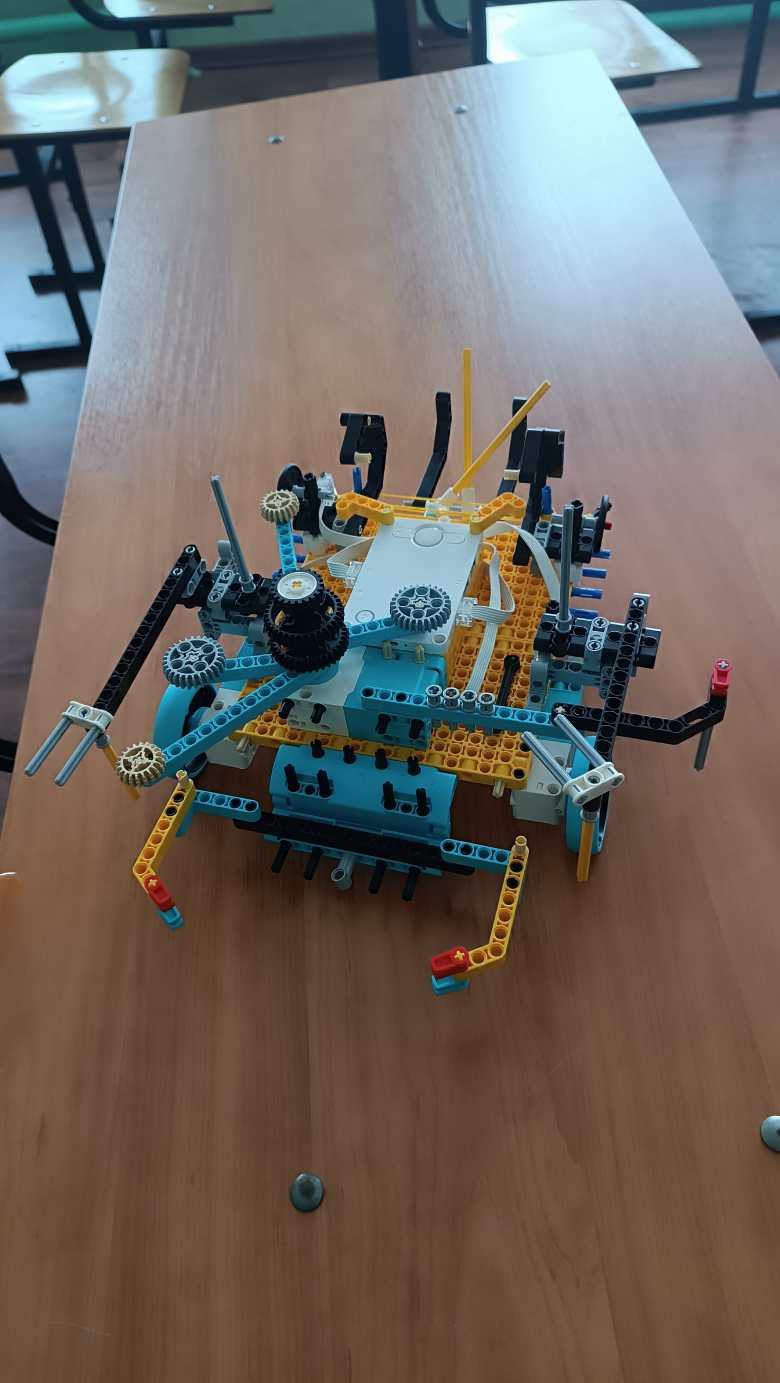
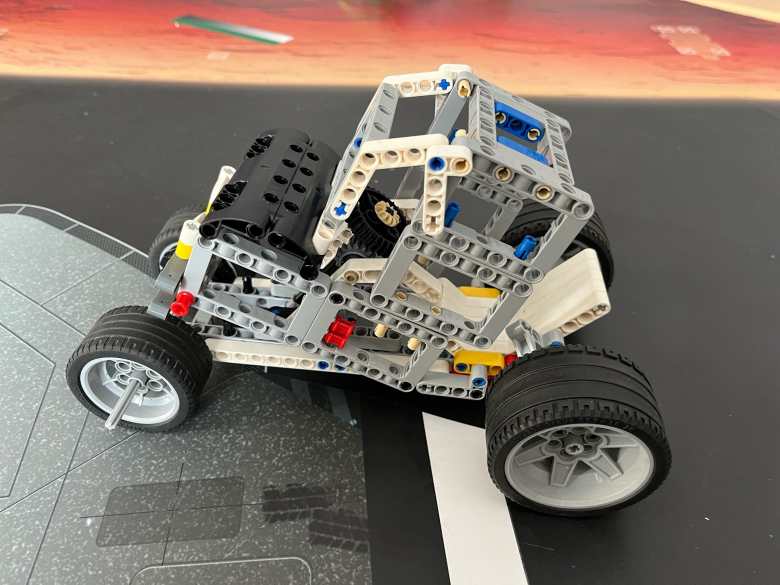
Другие работы